دانلود با لینک مستقیم و پر سرعت .

نوع فایل: word
قابل ویرایش 160 صفحه
چکیده:
در این پایان نامه یک ژنراتور سوئیچ رلوکتانس kw 20 با سرعت نامی rpm 100 برای استفاده در مبدل های انرژی بادی تحریک مستقیم طراحی شده است. در انتخاب ساختار و طراحی این ژنراتور مسائل مربوط به نویز آکوستیک و لرزش اجزای مکانیکی در جهت بهبود سازگاری ژنراتور در تبدیل انرژی بادی مورد توجه قرار گرفته اند.
طراحی ژنراتور بگونه ای صورت گرفته است که در مد تحرک تک پالسه کارکند. با استفاده از یک مدل تحلیلی مشخصه های شار پیوندی در ژنراتور محاسبه شده و منحنی های مربوط به کارکرد الکتریکی ژنراتور شبیه سازی شده اند. با تعیین مدل شار در قسمت های مختلف ژنراتور تلفات آهنی در هر یک از این قسمت ها محاسبه می شود.
تلفات مسی و تلفات هدایتی مدار الکترونیک قدرت نیز با استفاده از شکل موج جریان فاز تعیین می گردد. سپس بازده ژنراتور محاسبه و بهینه سازی طرح با استفاده از بازده و با روش سعی و خطا انجام می شود.
مقدمه:
1-2-1) توان تولیدی توسط توربین بادی
گشتاور تولیدی در پره¬های توربین بادی تابعی از پروفایل پره، سرعت چرخشی، زاویه گام و شعاع پره¬ها به صورت زیر است [1]:
(1-1) R3V2 (β، λ p Ct( π Tm = 1/2
که در آن V سرعت باد در میان پره¬ها، (β، λ)Ct ضریب گشتاور، β زاویه گام، R شعاع توربین بادی و ρ چگالی هوا می¬باشد (به طور نمونه در حدود 3 kg/m5/ 1). عبارت λ ضریب (β، λ)Ct را به سرعت باد و سرعت چرخشی وابسته می¬سازد، که نسبت سرعت قله¬ای نامیده شده و به صورت زیر تعیین می¬شود:
(1-2) = ωR/V λ
که در آن ω سرعت چرخشی توربین بادی است. مقدار ضریب گشتاور (β، λ)Ct، توابعی غیر خطی از β و λ است و به مشخصه¬های آیرودینامیکی پروفایل پره بستگی دارد. شکل (1-1) یک منحنی نمونه از (β، λ)Ct را ارائه می¬دهد [2]. دقت شود (β، λ)Ct تابعی از پروفایل پره و مستقل از شعاع است.
فهرست مطالب:
1) مقدمه و مروری بر سیستم های ژنراتوری توربین بادی
1-2-1) توان تولیدی توسط توربین بادی
1-2-2) جعبه دنده و اینرسی توربین های بادی
1-2-3) عملکرد سرعت ثابت توربین های بادی
1-2-3-1) ژنراتورهای القایی
1-2-3-2) ژنراتورهای سنکرون
1-2-4) عملکرد سرعت متغیر توربین های بادی
1-2-4-1) ژنراتور سنکرون
1-2-4-2) ژنراتور القایی قفس سنجابی
1-2-3-4) ژنراتور القایی روتور سیم پیچی شده
1-2-4-4) ژنراتور آهنربای دائم سنکرون
1-2-4-5) ژنراتور سوئیچ رلوکتانس
2) ماشین سوئیچ رلوکتانس و تئوری عملکرد آن
2-1) مقدمه
2-2) دید کلی در مورد ماشین سوئیچ رلوکتانس
2-2-1) سیستم ژنراتور سوئی رلوکتانس
2-2-1-1)ژنراتور سوئیچ رلوکتانس
2-2-1-2) آشکار ساز موقعیت رتور
2-2-1-3) مبدل قدرت ژنراتور سوئیچ رلوکتانس
2-2-1-4) مبدل قدرت ژنراتور سوئیچ رلوکتانس
2-2-1-4) کنترل کننده
2-2-2) مزایای ماشین سوئیچ رلوکتانس
2-2-3) معایب ماشین سوئیچ رلوکتانس
2-2-4) ژنراتور سوئیچ رلوکتانس و دیگر ژنراتورهای بکاررفته برای تبدیل انرژی باد
2-3) تئوری عملکرد ماشین سوئیچ رلوکتانس
2-3-1) منحنی های مغناطیسی
2-3-2) شکل موج های جریان فاز و کنترل گشتاور
2-3-3) محاسبه گشتاور
2-3-4) شکل موج جریان خازن الکترولیتی
3) تلفات در ژنراتور سوئیچ رلوکتانس
3-1) مقدمه
3-2) محاسبه تلفات
3-2-1) محاسبه تلفات آهنی هسته
3-2-1-1) روش محاسبه تلفات آهنی هسته
3-2-1-2) شکل موج هار شار هسته و محاسبه تلفات آهنی
3-2-2) تلفات مسی سیم پیچ ها
3-2-3) تلفات الکترونیک قدرت
3-2-4) محاسبه تلفات کل و بازده
4) کنترل ژنراتور سوئیچ رلوکتانس
4-1) مقدمه
4-2) مدهای کنترل ژنراتور سوئیچ رلوکتانس
4-2-1) کنترل تک پالسه
4-2-2) کنترل ولتاژ- PWM برشگری نرم
4-2-2) کنترل جریان- برشگری سخت
4-2-4) کنترل جریان- برشگری نرم
4-3) تحریک بهینه ژنراتور سوئیچ رلوکتانس
4-3-1) نگاشت مشخصه های ژنراتور سوئیچ رلوکتانس
4-3-2) انتخاب بهینه زوایای تحریک
5) مدلسازی تحلیلی شار پیوندی در ماشین سوئیچ رلوکتانس
5-1) مقدمه
5-2) مدل تحلیلی انتخاب شده
5-2-1) محاسبه تحلیلی اندوکتانس ماشین در حالت ناهمپوشانی قطب ها
5-2-1-1) سهم روتور در اندوکتانس حالت ناهمپوشانی
5-2-1-2) سهم استاتور در اندوکتانس حالت ناهمپوشانی
5-2-1-3) اندوکتانس مربوط به دورهای انتهایی سیم پیچ
5-2-1-3) اندوکتانس مربوط به دورهای انتهایی سیم پیچ
5-2-2) شار پیوندی با یک فاز در حالت همپوشانی قطب ها
5-2-3) مشخصه های شار پیوندی فاز ژنراتور طراحی شده
6) شبیه سازی ژنراتور سوئیچ رلوکتانس 8/12
6-1) بلوک شبیه سازی کل سیستم
6-2) بلوک شبیه سازی سیستم قدرت
6-2-1) بلوک شبیه سازی فاز
6-3) بلوک کنترل شبیه سازی فاز
6-3-1)بلوک شبیه سازی کنترل کننده مد تک پالسه
6-3-2) بلوک شبیه سازی کنترل کننده ولتاژ PWM برشگری نرم
6-3-3) بلوک شبیه سازی کنترل کننده جریان مد برشگری نژسخت
6-3-4) بلوک شبیه سازی کنترل کننده جریان مد برشگری نرم
6-4) بلوک اندازه گیری متغیرها و محاسبه تلفات جریانی
6-5) بلوک شبیه سازی شکل موج های شار و محاسبه تلفات آهنی
6-5-1) بلوک شبیه سازی شکل موج شار قطب روتور
6-5-2) بلوک شبیه سازی شکل موج شار طوقه روتور
6-5-3) بلوک مشتق گیر شار
6-5-4) بلوک شبیه سازی چگالی تلفات
6-5-4-1) بلوک شبیه سازی فرکانس معادل و دامنه تغییرات شکل موج شار
6-5-4-1-1) بلوک شبیه سازی دامنه شکل موج شار
6-5-4-1-2) بلوک شبیه سازی نمو شار و زمان
6-5-4-1-3) بلوک شبیه سازی چگالی انرژی
7) انتخاب پیکربندی و طراحی ژنراتور سوئیچ رلوکتانس
7-1)طراحی ژنراتور سوئیچ رلوکتانس
7-1-1) انتخاب تعداد فازها و قطب ها استاتور و روتور
7-1-2) انتخاب قطر و طول محور روتور
7-1-3) انتخاب قطر استاتور و طول کلی ماشین
7-1-4) انتخاب طول شکاف هوایی
7-1-5) انتخاب کمان های قطب استاتور و روتور
7-1-6) انتخاب عمق شیار روتور
7-1-7) انتخاب ضخامت طوقه روتور
7-1-8) انتخاب قطر محور
7-1-9) انتخاب ضخامت طوقه استاتور
7-1-10) انتخاب عمق شیار استاتور
7-1-11) انتخاب تعداد دور سیم پیچ های قطب استاتور
7-1-12) انتخاب سطح مقطع و چگالی جریان سیم پیچ های قطب استاتور
7-2) فلوچارت طراحی
7-3) ملاحظات نویز در طراحی ژنراتور سوئیچ رلوکتانس
7-3-1) حذف نویز با روش کموتاسیون دو مرحله ای
7-3-2) حذف نویز با طراحی ابعاد
7-4) مشخصات و عملکرد ژنراتور طراحی شده
نتیجه گیری
پیشنهاد
مراجع
ضمیمه الف
ضمیمه ب
ب-1) ترانزیستور IGBT
ب-2) دیود قدرت بازیافت سریع
فهرست جداول:
جدول 7-1) داده های ابعاد ژنراتورهای سه فاز
جدول 7-2) داده های عملکرد ژنراتورهای سه فاز
جدول 7-3) داده های ابعاد ژنراتورهای سه فاز
جدول 7-3) داده های ابعاد ژنراتورهای سه فاز
جدول 7-4) داده های عملکرد ژنراتورهای سه فاز
جدول 7-5) ترکیب های تعداد قطب استاتور بر رتور معتبر
جدول 7-6) مقادیر نوعی K, TRV وσ
جدول 7-7- مقادیر نوعی برای نسبت قطر روتور به استاتور و کمان های قطب
جدول 7-8- مشخصات ژنراتور سوئیچ رلکوتانس 8/12 طراحی شده
جدول ب-1- مشخصات حداکثر در درجه حرارت محیط 25 درجه
جدول ب-2- اندازه ها و مشخصات اصلی دیودهای قدرت
فهرست اشکال:
شکل 1-1- مشخصه c1(λ,β) یک پروفایل پره نوعی
شکل 1-2- مشخصه ضریب توان پروفایل پره نوعی
شکل 1-3- مشخصه توان منحنی Cp-λ پهن
شکل 1-4- مشخصه توان منحنی Cp-λ باریک
شکل 1-5- عملکرد در نسبت سرعت قله ای بهینه
شکل 1-6- ژنراتور سنکرون سرعت متغیر- دو مبدل پشت به پشت
شکل 1-7- ژنراتور سنکرون سرعت متغیر- کنترل جریان میدان
شکل 1-8- ژنراتور القائی- تحریک خازنی
شکل 1-9- ژنراتور القائی- دو مبدل پشت به پشت
شکل 1-10- ژنراتور القائی روتور سیم پیچی شده
شکل 2-1- مقطع ماشین سوئیچ رلوکتانس 6/8
شکل 2-2- بلوک دیاگرام سیستم ژنراتور سوئیچ رلوکتانس
شکل 2-3- مبدل قدرت نیم پل نامتقارن
شکل 2-4- قطب های استاتور و روتور هم خطی و ناهم خطی
شکل 2-5- منحنی های مغناطیسی
شکل 2-6- شکل موج جریان در سرعت زیاد و حالت موتوری
شکل 2-7- شکل موج جریان در سرعت زیاد و حالت ژنراتوری
شکل 2-8- شکل موج جریانت نوعی در سرعت کم
شکل 2-9- تبدیل انرژی
شکل 2-10- مسیرهای تحریک برای دو مد تک پالسه و برشی
شکل 2-11- مشخصه گشتاور نوعی
شکل 2-12- شکل موج جریان سیم پیچ در Kw2 و rpm 750
شکل 2-13- شکل موج جریان سیم پیچ در Kw2 و rpm 2000
شکل 2-14- شکل موج جریان خازن الکترولیتی
شکل 3-1- مشخصه های شار پیوندی ژنراتور نمونه 6/8
شکل 3-2- شکل موج های شار در قسمت های مختلف مدار مغناطیسی
شکل 3-3- چگالی توان تلفاتی در قسمت های مختلف هسته
شکل 3-4- تلفات آهنی در قسمت های مختلف ژنراتور نمونه
شکل 3-5- تلفات آهنی کل بر حسب زاویه هدایت
شکل 3-6- شکل موج های جریان فاز ژنراتور بر حسب زاویه هدایت
شکل 3-7- جریان موثر فاز بر حسب زاویه هدایت
شکل 3-8- تلفات مسی بر حسب زاویه هدایت
شکل 3-9- تلفات الکترونیک قدرت بر حسب زاویه هدایت
شکل 3-10- تلفات متوسط کل بر حسب جریان موثر فاز
شکل 3-11- توان متسوط خروجی بر حسب زاویه هدایت
شکل 3-12- بازده بر حسب زاویه هدایت
شکل 4-1- سیستم کنترل نوعی ژنراتور
شکل 4-2- حالت هدایت در یک فاز
شکل 4-3- شکل موج های عملکرد تک پالسه
شکل 4-4- شکل موج های PWM- برشگری نرم
شکل 4-5- شکل موج های تنظیم جریان- برشگری سخت
شکل 4-6- شکل موج های تنظیم جریان- برشگری نرم
شکل 4-7- نگاشت توان خروجی ژنراتور
شکل 4-8- نگاشت جریان موثر فاز ژنراتور
شکل 4-9- نگاشت تلفات ژنراتور
شکل 4-10- توان متوسط خروجی ژنراتور برحسب زاویه روشن شدن
شکل 4-11- توان متوسط خروجی ژنراتور برحسب زاویه هدایت
شکل 4-12- تمام نقاط کاری ممکن برای جریان موثر فاز
شکل 4-13- تمام نقاط کاری ممکن برای تلفات
شکل 4-14- نقاط انتخابی بر اساس حداقل جریان موثر فاز
شکل 4-15- نقاط انتخابی بر اساس حداقل تلفات در ژنراتور
شکل 4-16- زوایای روشن شدن بهینه بر حسب توان متوسط خروجی
شکل 4-17- زوایای هدایت بهینه بر حسب توان متوسط خروجی
شکل 5-1- مقایسه شار پیوندی روش المان محدود و تحلیل برای ماشین 8/12
شکل 5-2- وضعیت ناهمپوشانی با فرض مستطیل بودن شکل قطب ها
شکل 5-3- وضعیت ناهمپوشانی برای حل میدان در شیار استاتور
شکل 5-4- مسیرهای بسته آمپری برای محاسبه شدت میدان مغناطیسی
شکل5-5- مدل ساده شده برای محاسبه فلوی پیوندی فاز در حالت هم پوشانی قطب ها
شکل 5-6- مشخصه شار پیوندی فاز ژنراتور طراحی شده
شکل 6-1- شبیه سازی ژنراتور سوئیچ رلوکتانس سه فاز 8/12
شکل 6-2- بلوک شبیه سازی سیستم قدرت
شکل 6-3- بلوک شبیه سازی یک فاز ژنراتور
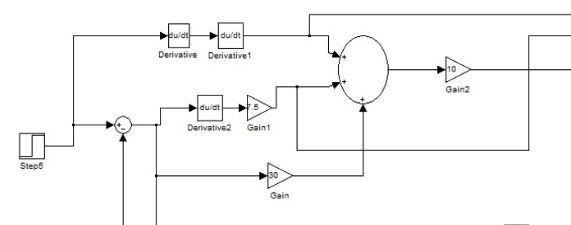
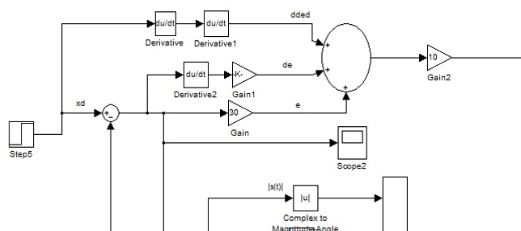
شکل 6-4-بلوک شبیه سازی کنترل کننده مد تک پالسه
شکل 6-5- بلوک شبیه سازی کنترل کننده مد PWM نرم
شکل 6-6- بلوک شبیه سازی کنترل کننده جریان مد برشگری سخت
شکل 6-7- بلوک شبیه سازی کنترل کننده جریان مد برشگری نرم
شکل 6-8- بلوک اندازه گیری متغیرها و محاسبه تلفات جریانی
شکل 6-9- بلوک شبیه سازی شکل موج های شار و محاسبه تلفات آهنی
شکل 6-10- بلوک شبیه سازی شکل موج های شار قطب روتور
شکل 6-11- بلوک شبیه سازی شکل موج های شار طوقه روتور
شکل 6-12- بلوک مشتق گیر شار
شکل 6-13- بلوک شبیه سازی چگالی تلفات
شکل 6-14- بلوک شبیه سازی فرکانس معادل شکل موج شار
شکل 6-15- بلوک شبیه سازی دامنه شکل موج شار
شکل 6-16- بلوک شبیه سازی نمو شار و زمان
شکل 6-17- بلوک شبیه سازی چگالی انرژی
شکل 7-1- گشتاور بر واحد وزن طراحی های مختلف
شکل 7-2- حداکثر VA مورد نیاز کنترل کننده
شکل 7-3- ماشین سوئیچ رلوکتانس سه فاز 8/6
شکل 7-4- ماشین سوئیچ رلوکتانس سه فاز 8/12
شکل 7-5- ماشین سوئیچ رلوکتانس چهار فاز 6/8
شکل 7-6- مقطع یک ماشین نمونه با Lstk/Dr=1
شکل 7--7- مثلث شدنی
شکل 7-8- فلوچارت طراحی ژنراتور سوئیچ رلوکتانس
شکل 7-9- شکل موج های جریان، نیروی شعاعی و شتاب گیری شعاعی استاتور
شکل 7-10- حذف لرزش با روش کموتاسیون دو مرحله ای
شکل 7-11- پارامترهای ابعاد استاتور
شکل 7-12- مقطع ماشین های اولیه و پیشنهادی
شکل 7-13- ساختارهای مختلف برای طوقه استاتور
شکل 7-14- شکل های مختلف برای قطب استاتور
شکل 7-15- مقطع ژنراتور 8/12 طراحی شده
شکل 7-16- زوایای تحریک
شکل 7-17- توان خروجی ژنراتور برحسب سرعت و زوایای تحریک انتخاب شده
شکل 7-18- بازده ژنراتور برحسب سرعت و زوایای تحریک انتخاب شده
شکل ب-1- نمای IGBT
شکل ب- 2- مشخصه خروجی ترانزیستور
شکل ب-3- نحوه کدگذاری دیودها
شکل ب-4- مشخصه افت ولتاژ مستقیم دیود
منابع و مآخذ:
منابع به صورت فایل عکس درون فایل موجود است
 در 40 اسلاید")




 و یا Variable Reluctance Motors")
